RESOURCES
精密对位技术在微型机械、超精密加工、半导体以及光学等领域具有重要的地位并有着十分广泛的应用前景。就像人看到帽子戴歪了并伸手调整一样,精密对位技术也需要检测与调整两个步骤。近些年,得益于超高分辨率摄像机等检测技术的发展与普及,我们已经可以以较低的价格获取到我们需要的偏差检测能力,完成了看的动作,而调的动作则需要交给本文的主角-高精度对位平台来解决。
对位平台最早是源自于德国,采用的方式是用pin针拨动有着磁力推杆的frame,让上方不动的玻璃得以和下方的框架结合,到了日本则被改为以电的三向UVW来命名的UVW平台,然后以此为蓝本,工程师再将其缩小,并大大地降低了高度,组合出了现在常看到的XXY形式的对位平台。原始的磁力推杆也进化到以线性导轨甚或交叉滚柱组装的单体模组,以及由三轴电机甚或四轴电机带动的高精度对位平台。
目前对位平台的应用,主要在高速、高精度需求的产业,例如半导体业的晶圆切割、封装检测、PCB制造业的曝光机、网印机、贴合机、压合机、PCB板裁切、丝印、手机制造业、LCD/LED面板制造业,光学检测等。
对位平台目前主流有如下三种结构:


基于成本和实现的双重考虑,XYR对位平台占据着极高的市场地位,也是本文的介绍对象。
工作原理:
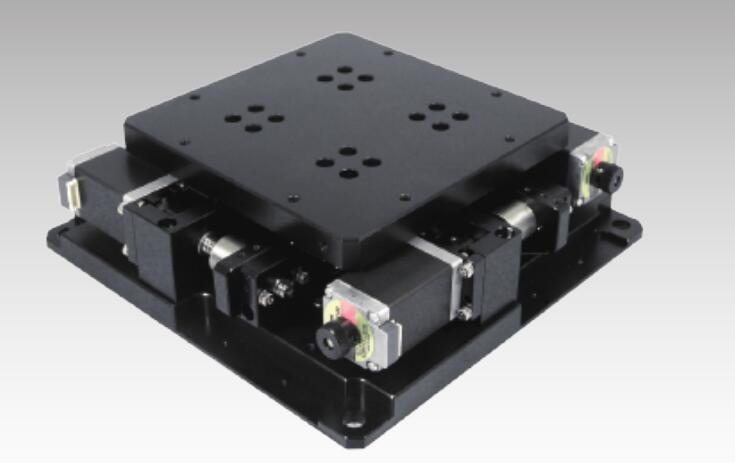
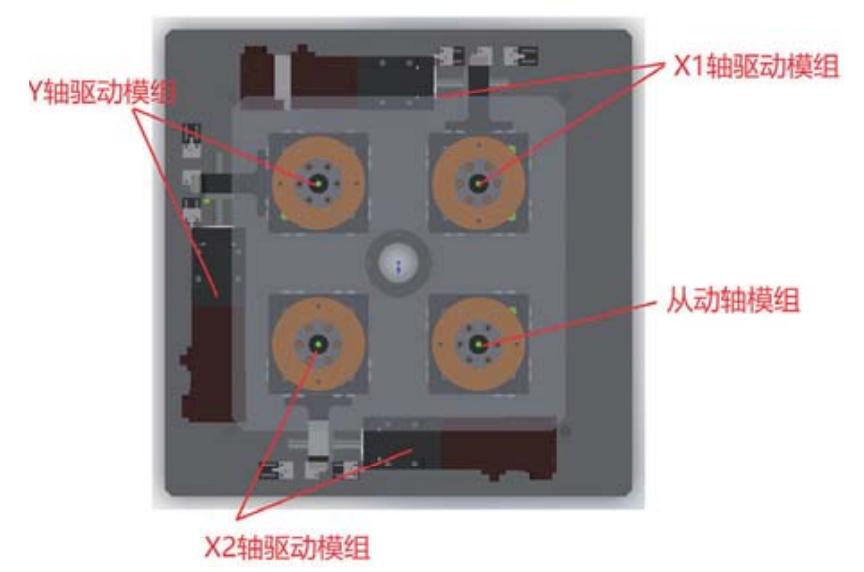
结构介绍;以我司主流型号XYR300400为例,XYR对位平台由上台面、下底面及中间的四套模组构成,每套模组均采用交叉滚柱导轨和交叉滚子轴承导向,带驱动模组(3套)采用小导程滚珠丝杠驱动,标配步进电机,也可换装五相步进电机或伺服电机。
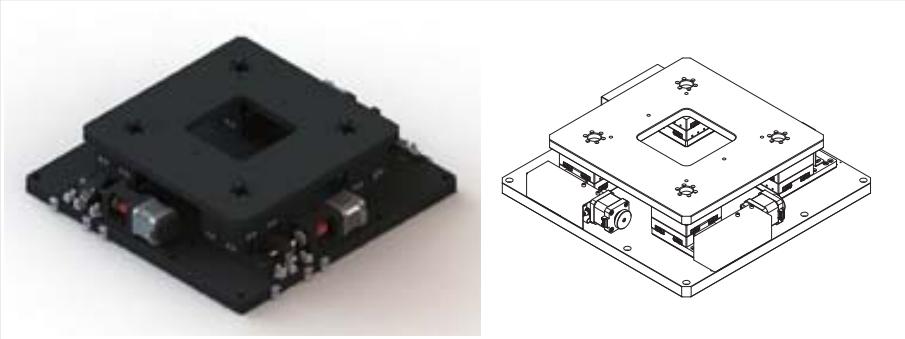
XYR300400结构示意图
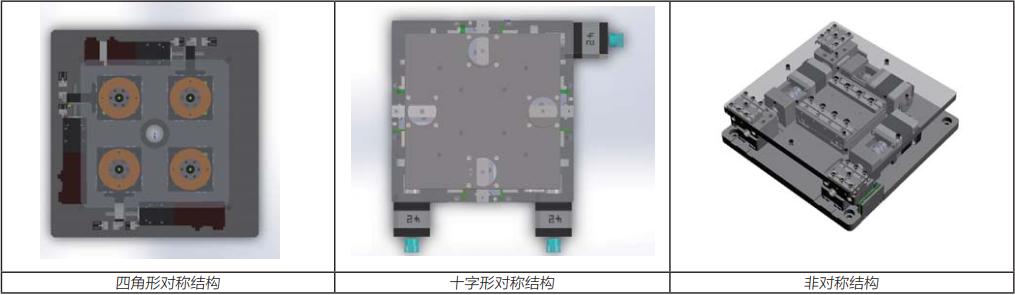
XYR对位平台通常由上台面、下底面和中间的四个模组构成,从模组分布的结构上分为:对称结构和非对称结构,而对称结构,又可分为“十字形对称结构”和“四角形对称结构”等。非对称结构通常用在超薄型或者客户定制的需求中,而且通常中间不能设计通孔,所以在一些特定情况下使用。而对称结构在运动算法方面比较通用,而且对位平台中心位置可以设计通孔,一定程度上可以满足透射式和反射式的对位需求,故被广泛采用。对称结构中的四角形分布,其刚性和可扩展能力更强,所以我司的对位平台更多地采用四角对称平台。
算法简述:
影响到对位平台运动算法的因素主要有两个:一个是对位平台的整体结构(四角形对称结构、十字形对称结构、非对称结构),另一个是模组中X轴、Y轴、θz 轴的组合方式。
对位平台整理结构
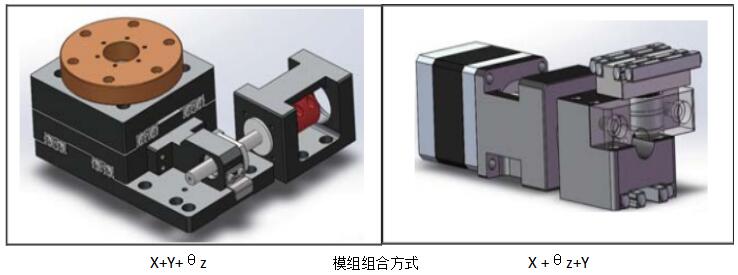
我司对位平台一般采用四角对称结构、模组为侧面驱动、模组内部组成方式为X+Y+θz。
下一章,我们将采用由浅入深的方式讲解对位平台的算法,其他模式的对位平台亦可参考其算法思想。


 13810146393
13810146393 在线咨询
在线咨询




