说明:
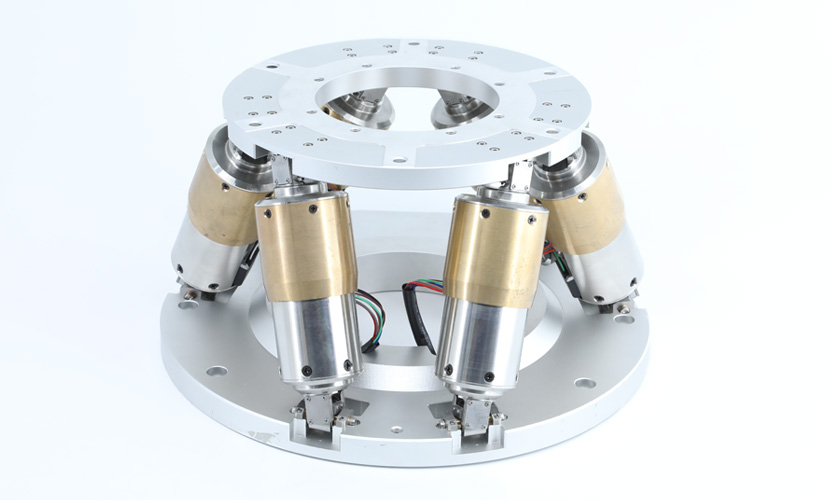
HXP系列六轴并联机器人系统主要用于高精度的六自由度调整,尤其适合于空间精密对位、微小器件加工和装配、光通信器件调芯、晶片检验等场合。
机械主体采用六个推杆+双虎克铰结构,具有刚性强、重复定位精度高、可任意位置安装等特点。推杆采用绝对定位型电机驱动,失电后保持位置信息,重启后无需归零。电机驱动系统采用标准工业总线EtherCAT进行通信,可靠性高、通信效率高,兼容市场上主流运动控制系统。
控制系统与软件支持各种欧拉角空间变换制式、支持机器人运行空间坐标系管理(包括世界坐标系、工件坐标系(64组)、机器人安装坐标系、机器人驱动坐标系、机器人工具坐标系(64组)的设置和转换)、支持载荷模拟、具有机器人空间校准功能、支持3D姿态仿真模拟、示教方案等功能。提供二次开发包,可以根据实际应用,整合成系统设备。
命名规则:




HXP系列六轴并联机器技术规格:(本系列产品为设计规格,技术指标以最终发布内容为准)
机器人参数|
机器人型号 |
HXP-824A |
|
行程X、Y(mm)* |
±34 |
|
行程Z(mm)* |
±15 |
|
行程θX、θY(°)* |
±11 |
|
行程θZ(°)* |
±25 |
|
推杆分辨率(µm) |
0.25 |
|
最小位移X、Y、Z(µm)** |
1 |
|
最小位移θX、θY、θZ(°)** |
0.001 |
|
回程X、Y(µm)** |
3 |
|
回程Z(µm)** |
1 |
|
回程θX、θY(”)** |
10 |
|
回程θZ(”)** |
15 |
|
单向重复精度X、Y(µm)** |
±0.5 |
|
单向重复精度Z(µm)** |
±0.3 |
|
单向重复精度θX、θY(”)** |
±2 |
|
单向重复精度θZ(”)** |
±2.5 |
|
推杆最大速度(mm/s ) |
80 |
|
推杆额定速度(mm/s ) |
40 |
|
水平负载(Kg) |
20 |
|
任意方向负载(Kg) |
2.5 |
|
电机类型 |
步进伺服电机 |
|
工作温度范围(℃) |
+10 ~ +40 |
|
材料 |
不锈钢/铝合金 |
|
质量(Kg) |
7 |
|
电缆长度(m) |
2 |
**注:实测典型值
控制器参数
|
控制器型号 |
TMC-NET-HXP |
|
额定电压(V) |
AC 220 |
|
额定电流(A) |
1.5 |
|
额定功率(W) |
350 |
|
工作温度范围(℃) |
0 ~ +55 |
|
基本轴类型 |
EtherCAT/RTEX/6 差分脉冲轴 (另输出口可配置 6 个单端脉冲轴) |
|
内部 IO 数 |
24 进 12 出(带过流保护,内置拓展) |
|
内部 ADDA 数 |
2 路 AD,2 路 DA(0-10V,内置拓展) |
|
最多扩展 AD/DA |
256 路 AD,128 路 DA |
|
脉冲位数 |
64 |
|
编码器位数 |
64 |
|
速度加速度位数 |
64 |
|
脉冲最高速率 |
10Mhz |
|
每轴运动缓冲数 |
4096 |
|
数组空间 |
640000 |
|
程序空间 |
8000Kbyte |
|
Flash 空间 |
|
|
256MByte |
256MByte |
|
通讯接口 |
外置:以太网 内置拓展:RS232,RS485,以太 网,U 盘,CAN, RTEX,EtherCAT |
| 型号 | PDF图纸 | 3D图纸 |
|---|---|---|
| HXP-824A |  |
 |


 13810146393
13810146393 在线咨询
在线咨询